
Kommunizierende Instrumente im OP
Um die Abläufe während einer Operation technisch zu unterstützen und zu optimieren, wird jedes chirurgische Instrument mit einem RFID-Tag versehen. Das von uns entworfene RFID-Lesegerät befindet sich in einem Armband. Es kann erfassen, welches Instrument sich in der Hand des Chirurgen oder der OP-Schwester befindet. Die Daten werden zur Optimierung der Sicherheit, Beschaffung und Wartung genutzt.
1.1 Die Herausforderung
Die Vermeidung von Fehlern und die Optimierung von Abläufen in Kliniken ist ein relevantes Thema, das uns alle betrifft. Denn ohne die große Leistung schmälern zu wollen, die OP-Teams in vielen Millionen Operationen pro Jahr in Deutschland erbringen, lässt sich feststellen, dass immer wieder vermeidbare Fehler auftreten, wie zum Beispiel:
- Die chirurgischen Instrumente sind überbeansprucht oder gar beschädigt [1].
- Es werden nicht zur Operation passende chirurgische Instrumente verwendet.
- Es treten Probleme mit der Sterilität auf [2].
- Ein Instrument oder Teile davon werden im Körper der Patienten vergessen [3].
Obwohl solche Fehler nur sehr selten auftreten, haben sie dann gravierende Auswirkungen und sind daher der Anlass für unsere Überlegungen gewesen, wie man den Chirurgen, die OP-Schwester und andere Mitarbeiter einer Klinik unterstützen kann. Dabei muss beachtet werden, dass dadurch die Leistungsfähigkeit des OP-Teams so wenig wie möglich oder im Idealfall gar nicht eingeschränkt wird. In Kontakt mit verschiedenen Medizintechnikunternehmen sowie dem Klinikum Tuttlingen haben wir ein System zum automatisierten Instrumententracking entwickelt. Während der Entwicklungszeit von über zwei Jahren und in Gesprächen mit vielen Experten zeigte sich, dass ein solches System nicht nur die oben genannten Probleme reduzieren kann, sondern viele weitere Vorteile mit sich bringt.
1.2 Unsere Lösung im Überblick
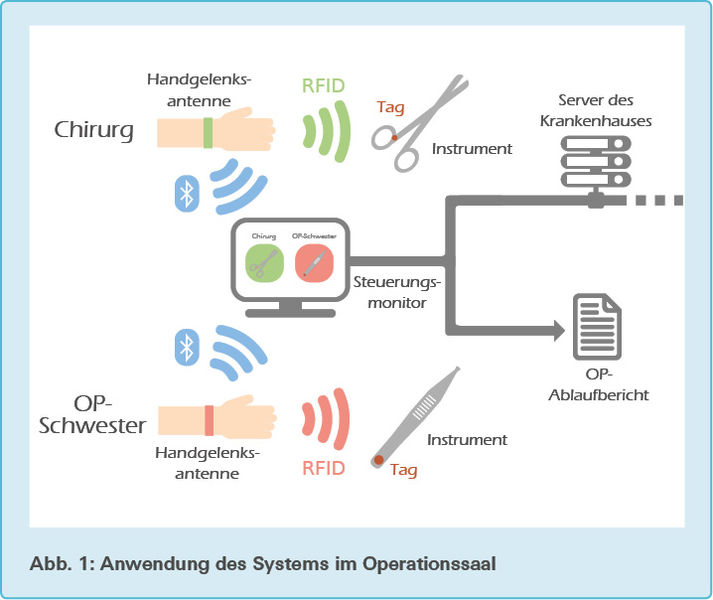
Im Zentrum der Überlegungen steht die Idee, sämtliche chirurgische Instrumente mit passiven RFID-Tags zu versehen. Diese sind inzwischen so robust, dass sie die Sterilisation überstehen, und günstig genug, dass durch ihren Einbau keine zu hohen Kosten entstehen. Diese Tags übermitteln auf Nachfrage ihre eindeutige Kennnummer und weitere wichtige Daten an ein von uns entwickeltes Lesegerät. Dieses Lesegerät befindet sich als Armband mit integrierter Handgelenksantenne unter dem Operationskittel oder ist in einer geplanten Weiterentwicklung sogar im OP-Kittel eingenäht. Dies ist vor allem für die Anwendung unseres Systems im Operationssaal wichtig, da hier sowohl der Chirurg, als auch die OP-Schwester eines dieser Lesegeräte tragen. Damit das Lesegerät nur die Instrumente erkennt, die sich momentan in der Hand des Anwenders befinden, ist das Feld der Antenne auf dessen Handbereich begrenzt. Über Bluetooth übermittelt unser Lesegerät die Daten in Echtzeit an eine zentrale Recheneinheit mit Steuerungsmonitor. Dieses Steuerungssystem kann im Hintergrund alle Daten der Operation speichern und so beim Aufbau einer Datenbank und den sich daraus ergebenden Einsatzmöglichkeiten helfen. Dadurch, dass wir unsere Software und Schnittstellen „open source" zur Verfügung stellen, können weitere individuelle Anwendungen von Nutzern hinzuprogrammiert werden.
1.3 Anwendungen und Vorteile unseres Systems
1.3.1 Im Operationssaal
Im Mittelpunkt unserer Entwicklung steht die Anwendung innerhalb des Operationssaals (siehe Abb. 1). Hierbei trägt jedes Mitglied des OP-Teams eines unserer Lesegeräte. Zusätzlich steht innerhalb des Operationssaals ein Steuerungsbildschirm zur Verfügung, welcher an eine Datenbank angebunden ist. Hier wird der Ablauf der Operation im Bezug auf den Einsatz der Instrumente automatisch dokumentiert.
Während der Operation können Fehler vermieden werden. Sowohl am Lesegerät als auch auf dem Steuerungsmonitor werden Warnmeldungen ausgegeben, wenn das Instrument zum Beispiel nicht ordnungsgemäß sterilisiert oder gewartet wurde.
Bei Bedarf können auf dem Steuerungsbildschirm während der Operation weitere Informationen zu den Instrumenten abgerufen werden.
Nach der Operation kann sichergestellt werden, dass kein Instrument im Patienten vergessen wurde. Unser System verfolgt, ob jedes Instrument, welches die OP-Schwester einmal dem Chirurgen gereicht hat, auch wieder zurückgegeben wurde und somit wieder sicher den Operationssaal verlässt.
Der in der Datenbank gespeicherte Ablauf stellt das Grundgerüst für den OP-Bericht. Dadurch wird dem Operateur Schreibarbeit erspart, da er nur noch individuelle Ergänzungen einfügen muss.
1.3.2 Zentralsterilisation
Die Mitarbeiter in der Zentralsterilisation tragen jeweils eines der Lesegeräte und haben ebenfalls einen Steuerungsbildschirm. Die Master-ID des zugehörigen Sterilcontainers ist auf dem Tag des Instruments gespeichert.
Vor der Sterilisation werden vom Instrument Herstellerinformationen zum Sterilisationsprozess abgerufen und dem Mitarbeiter zur Verfügung gestellt. So kann schneller nachgeschaut werden, ob zum Beispiel besondere Hinweise zum Sterilisieren des Instrumentes vorhanden sind oder besonders auf etwas achtgegeben werden muss.
Nach der Sterilisation können die Instrumente schneller den passenden Containern zugeordnet werden. Bisher wird zuerst die Master-ID eines Containers gescannt und dann anhand einer Liste herausgesucht, welche Instrumente in diesen Container gehören. Da viele verschiedene Instrumente auf dem Tisch liegen, ist das langwierig und fehleranfällig. Mit unserem System gehen wir umgekehrt vor. Der Mitarbeiter kann ein beliebiges Instrument in die Hand nehmen und bekommt sofort angezeigt, in welchen Container dieses Instrument einsortiert werden muss.
Beim Einsortieren der Instrumente wird die vorangegangene Sterilisation automatisch auf dem Tag der Instrumente dokumentiert.
1.3.3 Beschaffung und Wartung
Auf dem Tag des Instruments sind viele Informationen, wie zum Beispiel die Abteilungszugehörigkeit innerhalb der Klinik, die Anzahl der Nutzungen und Daten zur letzten Wartung, gespeichert. Darüber hinausgehende statistische Informationen können von der angebundenen Datenbank abgerufen werden.
Die Siebbestückung vor der OP kann optimiert werden. Bereits heute finden in Kliniken sogenannte Sieboptimierungen statt. Dabei geht es darum, aufgrund von Erfahrungen der Chirurgen die Zusammensetzung der Siebe für die jeweilige Operation zu verbessern. Mit unseren statistischen Daten zur Einsatzhäufigkeit eines Instruments kann dieser Prozess zum ersten Mal mit objektiven Daten untermauert werden.
Außerdem kann hierdurch der Bestand von Instrumentarium im Klinikum anhand der Nutzungshäufigkeit dem wirklichen Bedarf angeglichen werden.
Wartungszyklen des einzelnen Instruments können sich mit unserem System auch nach der tatsächlichen Einsatzhäufigkeit richten. Heute müssen Instrumente nach einem bestimmten Nutzungszeitraum zur Wartung geschickt werden. Nun kann hier auch der Parameter der Nutzungshäufigkeit mit einfließen. Somit müssen Instrumente, die selten benutzt wurden, nicht unnötig oft gewartet werden.
Die Kosten der Instrumente bleiben den Klinikbereichen eindeutig zugeordnet. Die Einhaltung dieser Zuordnung kann mit unserem System geprüft und dokumentiert werden. So kann zum Beispiel eine intensiv benutzte Klemme aus der Unfallchirurgie nicht in einen anderen Bereich geraten, in dem sie dann bricht und hier Kosten verursacht.
1.3.4 Medizintechnikunternehmen als Hersteller
Auf dem Tag der Instrumente können verschiedenste Informationen des Herstellers gespeichert werden.
Ein eindeutiger UDI kann auf dem Tag des Instruments gespeichert werden. Bereits jetzt ist es in den USA Pflicht, jedes Instrument eindeutig anhand einer Nummer zu kennzeichnen. Dieser UDI ist dann in einer globalen Datenbank (z. B. GUDID) hinterlegt. In der Europäischen Union soll eine entsprechende Regelung eingeführt werden [26].
Die Einhaltung der Garantiebedingungen bezüglich der Wartung kann kontrolliert werden. Der Ort und die Zeit der letzten Wartung werden auf dem Tag des Instruments gespeichert. Somit kann überprüft werden, ob die Wartung ordnungsgemäß erfolgt ist.
1.3.5 Medizintechnikunternehmen als Serviceanbieter
Serviceunternehmen können Instrumente mit unserer Technik nachrüsten, wodurch sich ein neues Geschäftsfeld ergibt. Die kleinen und günstigen Tags können auch in vorhandene Instrumente, z. B. im Rahmen der Wartung, nachträglich eingebracht werden.
Die Informationstechnologie (Software, Datenbank, etc.) um unser System kann individuell auf jede Klinik angepasst werden. Diese Anpassungen können als weitere Serviceleistung des Medizintechnikunternehmens, welches über das nötige Know-how verfügt, angeboten werden.
Um diese und weitere Anwendungen umsetzen zu können, müssen beispielsweise in einer Klinik mehrere Lesegeräte angeschafft werden. Nichtsdestotrotz ist unsere Lösung betriebswirtschaftlich interessant, weil sie gemäß unserer Kostenplanung mit einem Materialwert von unter 100 € für das Lesegerät sehr kostengünstig ist. Diese Angaben beziehen sich auf unseren Prototypen, in einer möglichen Serienfertigung sind die Materialkosten aufgrund der größeren Stückzahl sogar noch geringer.

Nach unseren Recherchen kommt RFID-Technik bereits in verschiedensten Anwendungsbereichen im medizinischen Umfeld zum Einsatz.
- Materialwirtschaft mit fallbezogener Zuordnung [4]: Hiermit können die Materialkosten für die Behandlung eines Patienten im Einzelnen dokumentiert werden. Außerdem können dadurch, dass die Tags als Etiketten an den Verbrauchsgegenständen angebracht sind, Nachbestellungen ohne Unterbrechungen und ohne manuelles Eingreifen ausgelöst werden.
- Patientenüberwachung [4]: Siemens hat bereits im Jahr 2004 im New Yorker „Jacobi Medical Center" den Einsatz von Patientenarmbändern mit einem integrierten RFIDTag getestet. Der behandelnde Arzt kann diesen Tag mit einem mobilen RFID-Reader auslesen und hat so jederzeit Zugriff auf die Daten des Patienten. Seit 2012 wird ein ähnliches System in der Notaufnahme im Klinikum Fulda im Tagesbetrieb eingesetzt [5].
- Arzneimittelüberwachung [4]: Um die Echtheit eines Arzneimittels zu garantieren, können Medikamentenverpackungen mit RFIDTags ausgestattet werden. Hierauf kann der Auslieferungsprozess dokumentiert und anhand der eindeutigen Kennnummer des Tags jede Verpackung eindeutig identifiziert werden.
- Zugangskontrolle zum OP [6]: Im Klinikum Rechts der Isar wurde 2007 ein Testprojekt der Siemens AG durchgeführt, bei dem das OPTeam mit RFID-Tags in Kartenform ausgestattet wurde. Diese Karten mussten vor jeder OP abgegeben werden. Somit konnte der Zugang zum OP überwacht werden.
- Verbleibskontrolle von Verbrauchsmaterial [7]: Sowohl die Siemens AG als auch ClearCount Medical Solutions bieten Systeme an, bei welchen Verbrauchsmaterial wie Tupfer mit RFID-Tags versehen werden. Bei der Entsorgung werden diese Materialien in einem Container mit integriertem RFID-Lesegerät entsorgt. So wird versucht zu verhindern, dass Tupfer im Körper zurückbleiben.
Die aufgezählten Anwendungsbereiche unterscheiden sich dadurch von unserer Idee, da hier die RFID-Tags nicht an den Instrumenten angebracht sind. Es ergeben sich somit für uns auch grundlegend andere Einsatzgebiete. Bei der Verbleibskontrolle von Verbrauchsmaterial im OP ergibt sich das Problem, dass RFID-Tags zu teuer sind, um sie in die vergleichsweise günstigen Verbrauchsmaterialien, welche nur einmal genutzt werden können, zu integrieren.
Zwar wird im Artikel des Arbeitskreis Medizintechnik Berlin-Brandenburg (AMBB) [4] darauf eingegangen, dass es möglich sei, starre Optiken mit RFIDTags zu versehen, um so die Sterilisation zu dokumentieren. Allerdings sind die Aussagen diesbezüglich wenig konkret. Allgemein konnten wir in Bezug auf die Identifikation von chirurgischen Instrumenten keinen Lösungsansatz finden, welcher darauf setzt, während der Operation das einzelne Instrument zu identifizieren, das gerade in Benutzung ist.
Nichtsdestotrotz gibt es andere Herangehensweisen, Instrumente mittels RFID zu identifizieren. So wurde beispielsweise im Jahr 2007 vom Bundesministerium für Wirtschaft und Technologie (BMWi) ein Projekt der Asanus GmbH gefördert [8]. Nach diesem Projekt hat die Asanus GmbH das Produkt „ARIS RFID" herausgebracht [9]. Hierbei muss das mit Instrumenten bestückte Sieb unter eine Art „Glocke" gehalten werden, welche dann in den Instrumenten platzierte Tags auslesen soll. Hier ist allerdings das Problem, dass diese Methode („Bulkreading") nicht immer zuverlässig funktioniert, da sich die unsortierten Instrumente gegenseitig abschirmen können und somit nicht gewährleistet werden kann, dass jeder Tag erkannt wird. Auch im Austausch mit Medizintechnikfirmen unserer Region zeigte sich, dass diese bisher keine komplett zuverlässige Methode für das Bulkreading finden konnten.
Die Firma Aesculap veröffentlichte im Jahr 2014 ein Patent für ein System. welches einen „Tunnelreader" enthält und ähnlich funktioniert [10]. Außerdem kommt eine optische Erkennung hinzu, um eine zweite, unabhängige Informationsquelle zu haben. So kann das Ergebnis des Bulkreadings mit dem Ergebnis der optischen Erkennung abgeglichen werden.
Sämtliche Lösungsansätze mit Bulkreading unterscheiden sich insofern von unserer Lösung, dass wir jedes Instrument in der Hand des OP-Teams erkennen und dabei auch eine größere Zuverlässigkeit gewährleisten können, da nur ein Instrument erkannt werden muss. Zusätzlich bringen Bulkreading-Systeme nicht die vielen Vorteile mit sich, die sich aus der statistischen Auswertung der Benutzung jedes einzelnen Instruments ergeben. Des Weiteren lässt sich unser tragbares RFID-Lesegerät auch in anderen Klinikbereichen, wie zum Beispiel in der Zentralsterilisation, sehr einfach und gewinnbringend einsetzen.
Wie bereits im Übersichtsschema (Abb. 1) erkennbar ist, haben wir uns bei der Kommunikation zwischen den chirurgischen Instrumenten und dem Lesegerät für den Einsatz von RFID-Technologie entschieden.
Für die Suche nach einer geeigneten Technologie erwiesen sich die folgenden Punkte aus unserem Anforderungskatalog als besonders kritisch:
- Zusatzkosten je Instrument: Da es in Kliniken eine riesige Anzahl an Instrumenten gibt, gilt es vor allem die Kosten für die zusätzliche Elektronik, welche an jedem Instrument angebracht werden muss, so gering wie möglich zu halten.
- Nachrüstungsmöglichkeit: Damit möglichst viele Instrumente von unserem System erkannt werden können, sollte es möglich sein, die Technologie auch an älteren Instrumenten nachzurüsten bzw. nachträglich auch in Instrumente fremder Hersteller einzubauen.
- Robustheit: Die in die Instrumente eingebrachte Elektronik muss, genau wie das chirurgische Instrument selbst, dem aufwändigen Sterilisationsprozess in der Zentralsterilisation standhalten. Hierbei treten hohe Drücke in Verbindung mit hoher Luftfeuchtigkeit und hohen Temperaturen auf, weshalb die Elektronik am chirurgischen Instrument selbst extrem robust sein muss.
Auf Grundlage dieser Kriterien zeigte sich bei unserer Recherche, dass diese Bedingungen nur erfüllt werden können, wenn die Elektronik, die am Instrument angebracht wird, an sich passiv ist und von außen mit Energie versorgt wird.
Ein RFID-System besteht aus einem Lesegerät, das mehrere Tags anhand einer bei der Produktion einmalig vergebenen UID eindeutig identifizieren kann. Außerdem können auf den Tags zusätzliche Daten gespeichert werden. Es gibt dabei sowohl aktive als auch passive RFID-Tags. Passive Tags werden im Unterschied zu aktiven Tags vom Lesegerät mit Energie versorgt (z. B. über elektromagnetische Induktion) und sind somit gut für unsere Anwendung geeignet. Zur Auswahl standen nun LF-RFID- (125 kHz), HF-RFID- (13,56 MHz) und UHF-RFID-Systeme (865 MHz) [11]. Diese unterscheiden sich darin, mit welcher Reichweite Tags vom Lesegerät erkannt werden können, wie die Reichweite durch die Umgebung beeinflusst wird und in der Höhe der Anschaffungskosten.
Die Wahl fiel auf das HF-RFID-System. Es weist eine Reichweite von bis zu einem Meter auf und wird nicht von wässriger Umgebung beeinflusst. Zwar nimmt die Reichweite der Systeme in metallischen Umgebungen ebenfalls ab, doch durch den Einsatz spezieller Tags für metallische Umgebungen, kann dieser Einfluss verringert werden. Diese Technologie ist am weitesten verbreitet und bietet robuste und passive Tags für metallische Umgebungen, welche den harten Bedingungen während der Sterilisation standhalten können. Ein Development-Kit ist bereits für unter 200 € erhältlich.
Um die Daten vom Lesegerät an den Steuerungsmonitor weiter zu leiten, nutzen wir ein UART-Bluetooth Modul am Lesegerät und einen Rechner mit Bluetooth-Adapter über eine virtuelle serielle Schnittstelle. Dies hat den Vorteil, dass auf dem Mikrocontroller im Armband nur eine gewöhnliche UART-Schnittstelle implementiert werden muss, um die Daten drahtlos und seriell an den Steuerungsmonitor übermitteln zu können.
Um uns in die Thematik der RFID-Technologie und -Kommunikation besser einarbeiten zu können, führten wir erste Versuche mit einem Developmentboard von Texas Instruments (TI TRF7960AEMV [12]) durch. Mit diesem Board zu arbeiten, hatte für uns verschiedene Vorteile: Zum einen konnten wir durch die umfangreiche Dokumentation Aspekte wie die Antennenanpassung besser verstehen. Zum anderen verfügte die beiliegende Open-Source- Firmware sowohl über eine Auswahl verschiedener Protokolle zur Kommunikation mit dem Tag, als auch über eine Demo-Software für den PC.
Mit der Entscheidung ein passives HFRFID- System zu entwickeln, fiel auch die Entscheidung, ein induktiv gekoppeltes System zwischen dem RFID-Tag und der notwendigen Antenne zu entwerfen. Eine geeignete Antenne stellt in diesem Fall eine Spulenantenne dar, die einen hohen induktiven Anteil besitzt.
Durch die hohe Frequenz und den sich damit ständig ändernden Stromfluss durch die Antenne, wird ein sich rasch änderndes magnetisches Feld um die Antenne erzeugt. Befindet sich ein Tag in der Nähe der Antenne, so wird die im Tag eingebaute Spulenantenne ebenfalls vom Magnetfeld durchsetzt. Durch den sich ändernden magnetischen Fluss wird in der Spulenantenne des Tags eine Spannung induziert, die den Chip des Tags mit Energie versorgt.
Um eine optimale Energieübertragung von einem Signalgenerator über die Antenne zum Tag gewährleisten zu können, ist es notwendig, die Antenne an das System anzupassen. Hierbei ist vor allem der Wechselstromwiderstand relevant. Dieser setzt sich zusammen aus dem realen, Ohm’schen Widerstand und dem imaginären Blindwiderstand, der die Phasenverschiebung bedingt durch die Induktivität der Spule L, beschreibt.
Für die Impedanz einer Spule gilt: Z = R + jX mit XL = 2πƒL sowie dem Ohm’schen Widerstand (dem Wirkwiderstand) R, dem Blindwiderstand (der Reaktanz) X und der imaginären Einheit j.
Die komplexe Impedanz der Antenne muss auf einen Wert von 50 ± j0 Ω angepasst werden, damit die Übertragung der Leistung optimal ist. Hierzu wird zunächst die komplexe Impedanz der Antenne gemessen, üblicherweise mit einem vektoriellen Netzwerkanalysator. Auf Grundlage dessen muss nun ein Anpassnetzwerk entworfen werden, welches die Impedanz der Antenne auf (möglichst) 50 Ω transformiert. Dazu wird die Impedanz zunächst in ein Smith-Diagramm [13] eingezeichnet. Bei diesem Hilfsmittel der komplexen Wechselstromrechnung kann die Berechnung der Impedanz geometrisch Ergeberfolgen. Die Anpassung auf 50 Ω, den Mittelpunkt des Smith-Diagramms, erfolgt üblicherweise durch ein Netzwerk aus Kondensatoren, Widerständen und Induktivitäten.
Um den theoretischen Hintergrund besser nachvollziehen zu können, versuchten wir die in der Dokumentation beschriebene Antennenanpassung nachzubilden [14]. Dazu bestimmten wir mittels eines Funktionsgenerators sowie eines Oszilloskops die Impedanz der Antenne auf Z = (10,4 + j132,3) Ω, was der angegebenen Impedanz von Z = (0,5 + j107) Ω relativ nahe kam. Im Anschluss daran versuchten wir, unser eigenes Anpassnetzwerk für diese Antenne zu entwerfen. Hierzu war unsere Idee, die Antenne durch einen Parallelwiderstand von 56 Ω und einen Serienkondensator von 620 pF anzupassen. Durch diese Anpassung konnten wir mit unserer Antenne auch einen Tag erfassen. Rückblickend war die Anpassschaltung mit elektridem relativ kleinen Parallelwiderstand nicht sehr günstig gewählt. Aus diesem Grund war die Reichweite der Antenne mit eigener Anpassung auch nicht so groß, wie mit der Boardanpassung.
Für die Anwendung ist es relevant, dass die Antenne ein möglichst starkes Magnetfeld erzeugt, um ihre Reichweite zu erhöhen. Dabei gibt es verschiedene Faktoren, die diese beeinflussen.
Da die Antenne in das Lesegerät, das am Handgelenk getragen wird, integriert werden soll, sind die Möglichkeiten der Antennengeometrie beschränkt. Zu Beginn haben wir mit kreisrunden Antennen experimentiert, um die Funktionsweise zu zeigen. Inzwischen betrachten wir das Handgelenk als Ellipse mit unterschiedlicher Größe und Exzentrizität. Dazu haben wir verschiedene Handgelenke mit Gips modelliert und daran die Geometrie untersucht. Aus diesen Ergebnissen haben wir für uns einen Standard entworfen. Bei diesem liegt der Umfang des Handgelenkes zwischen 15,5 cm und 23,0 cm, die numerische Exzentrizität zwischen 0,7 und 0,56. Diese Geometrien überführten wir in eine CAD-Software und erstellten standardisierte Handgelenksformen am 3D-Drucker, die als Modell für unsere Antennen dienen.
Bei idealen Spulen ohne Ohm’schen Widerstand steigt das Magnetfeld mit der Anzahl der Windungen. Unsere Spulenantenne ist jedoch keine ideale Spule und hat einen Ohm’schen Widerstand. Erhöht man nun die Zahl der Windungen, erhöht man damit auch den Ohm’schen Widerstand, was wiederum einen geringeren Stromfluss nach sich zieht. So gibt es für jede Antenne eine optimale Anzahl an Windungen, bei der das Produkt von Windungszahl und Strom maximal ist.
Der Wechselstromwiderstand einer Antenne ist nicht mit dem Gleichstromwiderstand gleichzusetzen. Fließt ein Wechselstrom durch einen elektrischen Leiter, so fließen die Elektronen nur auf der Außenhaut des Leiters. Dieser Skin-Effekt vergrößert den Wechselstromwiderstand. Für den verwendeten Frequenzbereich von 13,56 MHz ist der Realteil der Impedanz daher deutlich größer als der Gleichstromwiderstand der Antenne.
Um Leiterschleifen zu erhalten, erwiesen sich Flachbandkabel als geeignet. Diese sind leicht in Form einer Antenne zu bringen, zudem haben die einzelnen Windungen durch das Raster des Flachbandkabels immer denselben Abstand. Die fortan betrachtete Antenne hat die Form einer Ellipse mit einem Umfang von 18,6 cm, eine numerische Exzentrizität von e =0,62, sechs Windungen und eine Querschnittsfläche des Leiters von 0,09 mm2.
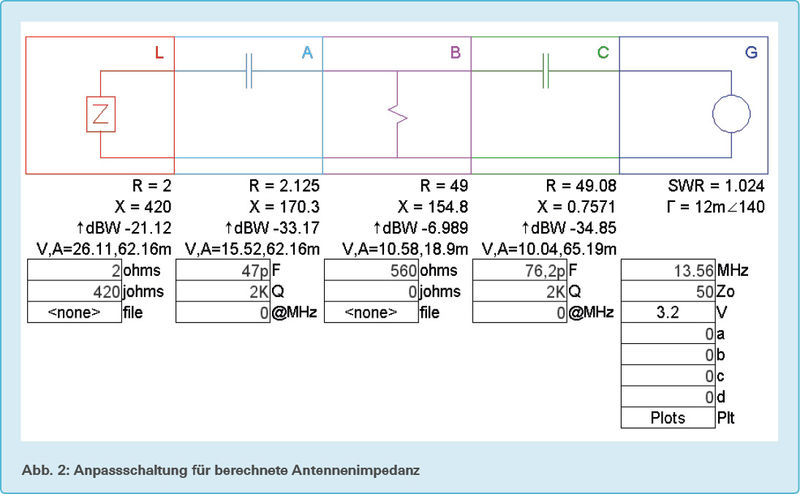
Die Impedanz wurde mittels des miniVNA-pro [27] bestimmt. Oberhalb von 200–300 Ω war dessen Genauigkeit jedoch nicht ausreichend. Daher wurde ein Anpassnetzwerk für die gemessene Antennenimpedanz erstellt und aus der gemessenen Gesamtimpedanz auf die Impedanz der Antenne zurückgerechnet. Auf diese Weise ergab sich ein Wert von Z = (2 + j420) Ω. Auf Grundlage dessen konnten wir nun die korrekte Anpassung für die Antenne finden. Hierfür nutzten wir einen Serienkondensator, einen Parallelwiderstand sowie einen weiteren Serienkondensator bzw. zwei Kondensatoren, um mit Bauteilen aus der E-12-Reihe auf die benötigte Kapazität zu kommen (siehe Abb. 2). Dabei haben wir die Bauteilwerte so gewählt, dass mögliche Toleranzen der Bauteile keine zu großen Auswirkungen auf die Funktionalität unseres Systems haben. Dieses Anpassnetzwerk wurde auch schon auf dem Developmentboard von TI verwendet, da durch den Parallelwiderstand die Güte der Antenne leicht beeinflusst werden kann. Diese gibt an, wie gedämpft das System ist und damit auch, welche Bandbreite die Antenne besitzt. Diese Güte ist für uns von hoher Relevanz, da wir nicht nur die Trägerfrequenz von 13,56 MHz sondern auch die Modulationen empfangen müssen.
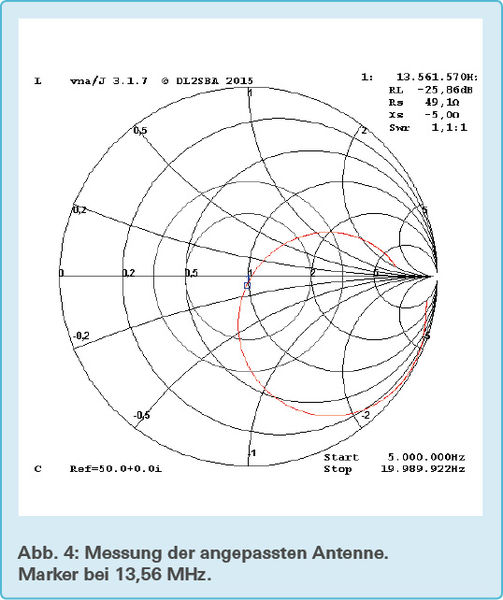
Mithilfe des Tools SimSmith konnten wir, wie in Abb. 3 zu sehen, die Impedanz sehr gut simulieren und so die Antennenimpedanz von Z = (2 + j420) Ω auf das Zentrum des Smith-Diagramms und damit auf 50 Ω anpassen. Diese Simulation der Impedanz konnten wir mit unseren Messwerten zur angepassten Antenne sehr gut belegen (siehe Abb. 4). Wir erreichen mit unserer angepassten Antenne ein SWR (auch als VSWR – voltage standing wave ratio [28] bekannt) von 1,1 sowie eine Rückflussdämpfung von –25,86 dB. In beiden Abbildungen ist noch ein Teilkreis im Smith-Diagramm zu sehen. Dieser beschreibt die Impedanz über einen Frequenzbereich von 5 MHz bis 20 MHz. Auch hierbei stimmen Simulation und Messergebnisse relativ gut überein.
Im Vergleich zur Patchantenne auf dem Developmentboard implementierten wir ein modulares Antennenkonzept. Dieses ermöglicht uns, verschiedenste Antennen mit unserem Board zu betreiben. Da jede Antenne ihre individuelle Anpassschaltung benötigt, mussten wir sowohl ein Mainboard als auch universelle Platinen für die Anpassschaltungen designen. Diese kleinen Platinen – im Weiteren „Matching-Boards" (siehe Abb. 5) genannt – können individuell mit Widerständen und Kondensatoren zur Anpassung der Antennenimpedanz bestückt werden und werden im Betrieb zwischen das Mainboard und die Antenne geschaltet.

Wie im Elektronikkonzept (Abb. 5) zu erkennen ist, verwenden wir als zentralen Mikrocontroller den MSP430F2370, der auch auf dem Developmentboard von TI verbaut ist. Dieser zeichnet sich durch seinen geringen Stromverbrauch aus und besitzt sämtliche Hardwaremodule (UART, SPI, Timer/PWM), welche wir für unsere Anwendung benötigen [15]. Außerdem war es uns somit möglich, auf der Grundlage der Open-Source-Firmware für das Developmentboard unsere eigene Firmware zu entwickeln. Der TRF7960 [16] kann parallel oder per SPI angesteuert werden und beherrscht alle gängigen ISO-Standards für HF RFID, was es uns erlaubt, zwischen einer Vielfalt von Tags auszuwählen. Zusätzlich ist auf dem Board noch ein Bluetooth-Modul von Roving Networks untergebracht, welches über das Bluetooth-SPP eine serielle Verbindung zwischen dem Mikrocontroller und dem Steuerungsmonitor herstellen kann [17, 18]. Vom Mikrocontroller aus kann diese Verbindung später wie eine UART-Kabelverbindung gehandhabt werden, was die Softwareentwicklung erleichtert. Weitere Komponenten auf dem Mainboard sind ein Piezo- Summer und ein Vibrationsmotor, über die im Notfall dringende Warnungen (wie z. B. niedriger Akkustand) direkt über das Armband ausgegeben werden können. Die Stromversorgung erfolgt über einen LiPo-Akku, dessen Spannung mithilfe eines Step-down-Konverters auf konstante 3,3 V geregelt wird. Des Weiteren haben wir uns dazu entschieden, sowohl den Anschluss für eine UART- als auch eine SPI-Verbindung herauszuführen, um gegebenenfalls Erweiterungsmodule ansteuern zu können.
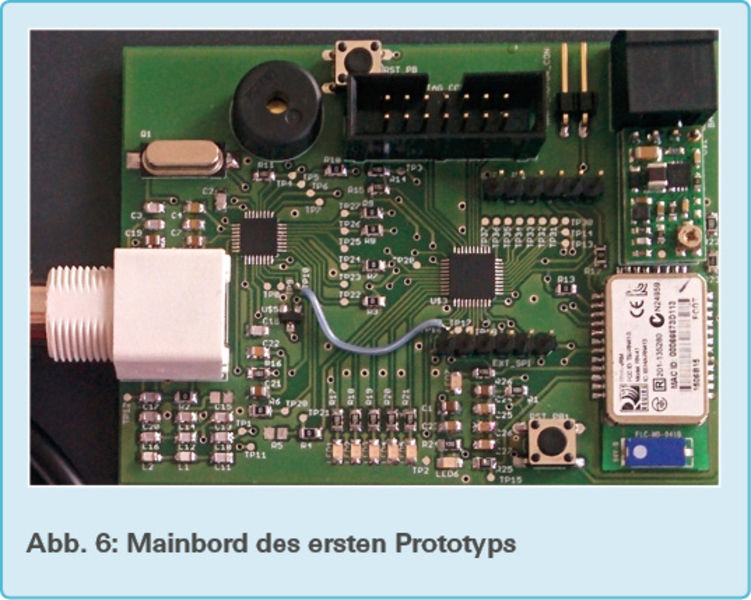
Auf Grundlage dieses ersten Elektronikkonzepts ging es darum, die Platinen für unseren Prototyp am PC zu entwickeln. Wir nutzten dabei das Programm EAGLE von Cadsoft, um zuerst den Schaltplan und danach ein passendes Layout zu entwerfen. Im Endeffekt entstand ein Mainboard mit den Maßen 80 mm x 60 mm (siehe Abb. 6). Diese Maße scheinen zwar auf den ersten Blick zu groß, um später in ein Armband zu passen, allerdings könnten diese Maße bei einem Serienprodukt noch deutlich verringert werden. Da wir die Platine selbst bestückten, war es trotz des Einsatzes von Reflow-Technik und feinsten Lötkolben nicht möglich, die Platine noch kleiner zu entwickeln.
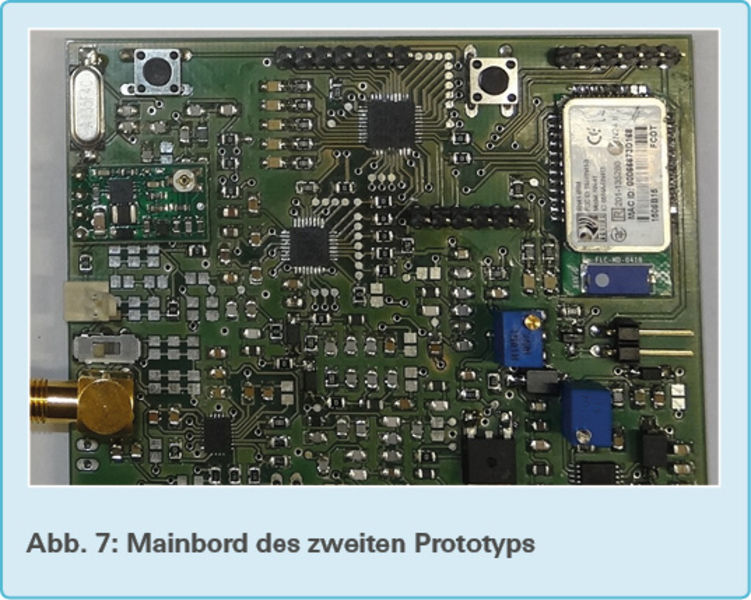
Bei der Entwicklung unseres zweiten Prototyps konnten wir auf unsere Erkenntnisse und Erfahrungen des ersten Prototyps zurückgreifen. So haben wir die Schaltung des TRF7960 und des MSP430F2370 unverändert übernommen. Auch die Bluetooth-Schnittstelle wurde wie beim ersten Prototyp beibehalten. Jedoch wurde der Piezo-Summer nicht übernommen, da die Lautstärke des Summers für die Anwendung im OP nicht ausreichend und die Abmessungen zu groß waren.
Neu hinzugekommen ist eine Verstärkerschaltung für das HF-Signal [20]. Mit dieser soll ein deutlich stärkeres Magnetfeld um die Antenne und damit eine deutlich höhere Reichweite des Lesegerätes erzielt werden. Hierzu ist der Ausgang des TRF7960 über einen Filter und einen Entkopplungskondensator mit einem MOSFET verbunden. Des Weiteren ist an diesen eine zusätzliche Spannungsversorgung angeschlossen. Diese Spannungsversorgung wird durch einen LM2700 gewährleistet. Dessen Ausgangsspannung ist maßgeblich für die Verstärkerleistung der gesamten Schaltung und kann über ein Potentiometer eingestellt werden. Hierbei wurden auch einige weitere Filter und Ferrite eingebaut, um mögliches Rauschen herauszufiltern. Zudem ist in diese Schaltung ein zweites Potentiometer integriert, mit dem die Einflüsse entstehender Wärme kompensiert werden können.
Außerdem haben wir die Grundlagen dafür geschaffen, den Akku des Lesegerätes induktiv zu laden. Hierzu kann die Antenne über einen Schalter mit einem Resonanzschwingkreis zu einem BQ51050B [21] verbunden werden. Mit diesem IC ist es möglich, einen LiPo-Akku über den Qi-Standard [22] (Standard zur kontaktlosen Energieübertragung) zu laden. Dabei sendet ein Qi-Ladefeld ein wechselndes Magnetfeld aus. Dieses Magnetfeld wiederum induziert in der Empfangsspule (in diesem Fall in unserer RFID-Antenne) eine Spannung. Gerät die Empfangsspule mit einem Kondensator in Resonanz, so vergrößert sich die Amplitude und eine höhere Energieübertragung ist möglich. Somit könnte im späteren Einsatz auf den Batteriewechsel des Lesegerätes verzichtet werden.
Zudem haben wir den BNC-Anschluss durch einen SMA-Anschluss ersetzt, um parasitäre Einflüsse bei der Impedanzanpassung zu minimieren und die Steckverbindung kompakter zu gestalten (siehe Abb. 7).
Bei den Versuchen mit dem Developmentboard von TI arbeiteten wir hauptsächlich mit der Firmware die von TI für das Developmentboard geschrieben wurde und deren Sourcecode im Internet frei verfügbar ist [23]. Außerdem gibt es von TI eine Software für den PC, mit welcher eidie Funktionalität des Developmentboards getestet werden kann. Dabei wird über die USB-Schnittstelle des Developmentboards ein virtueller serieller Port erstellt, über welchen Daten übermittelt werden können. TI hat hierfür selbst ein Protokoll entworfen. Neben verschiedenen Tests zur allgemeinen Funktionalität sowie mögliche Reichweiten etc. ging es für uns, was die Software betrifft, zuallererst darum, nachzuvollziehen wie genau die Firmware von TI aufgebaut ist und wie sie funktioniert.
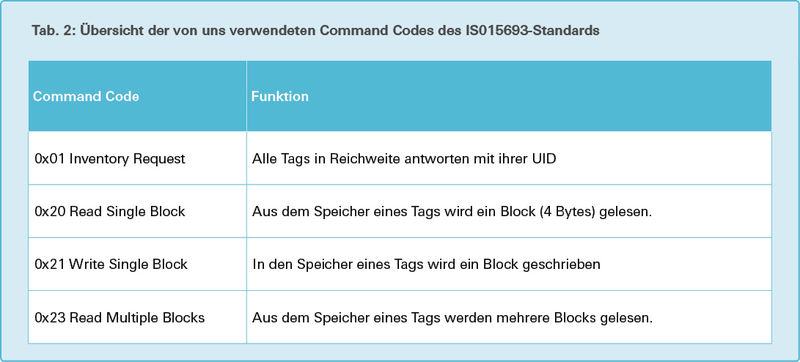
Bei der kompletten Kommunikation zwischen dem PC und dem Tag kommen bei der TI-Software insgesamt drei verschiedene Protokolle zum Einsatz, die sich zum Teil überlappen. Deshalb fokussierten wir uns zuerst auf den ISO15693-Standard [24], mit dem sämtliche Tags arbeiten, die wir bisher getestet hatten. Dieser Standard beschreibt die Kommunikation zwischen dem Lesegerät und dem Tag und schreibt für jede Anfrage vor, dass zuerst ein Byte mit sogenannten Flags übertragen wird. Mit diesen wird festgelegt, ob es sich beim folgenden Kommando um ein an einen bestimmten Tag adressiertes Kommando handelt. Es folgt ein Byte, welches den sogenannten Command Code enthält. Mit diesem können nun unterschiedliche Anfragen geschickt werden (siehe Tab. 2). Je nachdem welcher Command Code gesendet wurde, wird dann eine bestimmte Anzahl an Bytes mit Parametern gesendet. Bei einem adressierten „Write Single Block"-Command wird dann zum Beispiel die UID des gewünschten Tags, gefolgt von der Block-Nummer, in welche geschrieben werden soll, und zuletzt dann noch 4 Byte Daten, die in den Block geschrieben werden sollen, gesendet. Jede Anfrage wird mit einer zyklischen Redundanzprüfsumme (CRC) abgeschlossen.
Bevor wir unsere Firmware entwickeln konnten, ging es darum, zuerst ein generelles Konzept für unsere Software zu entwerfen. Dazu war es aber noch notwendig abzugrenzen, welche Daten auf dem Tag eines Instruments gespeichert werden sollen (siehe Tab. 3).
Dazu gehört der UDI (Unique Device Identifier) des Instruments. Denn für den amerikanischen Markt ist es bereits jetzt Pflicht, einen UDI auf jedem Instrument anzubringen, welcher in der GUDID (General UDI Database) der U.S. Food and Drug Administration (FDA, dt. Behörde für Lebens- und Arzneimittel) unter anderem zusammen mit Informationen zur Sterilisation hinterlegt ist. Auch in Europa soll das Anbringen eines solchen UDI bald Pflicht werden.
Des Weiteren reservierten wir einen Teil des Speichers für den Hersteller sowie den Eigentümer des Instruments. Auf jeden Fall sollen immer die Daten zur letzten Benutzung des Instruments gespeichert werden. Alle Daten zur bisherigen Nutzung des Instrumentes können bei Bedarf dann über eine Datenbank abgerufen werden. Zusätzlich können auf dem Tag noch Daten zur Wartung und Sterilisation gespeichert werden. Somit können über längere Zeit beispielsweise Regelmäßigkeiten im Wartungsaufwand, die im Zusammenhang mit der Nutzungshäufigkeit stehen, festgestellt werden.

Bei dem Softwarekonzept ging es uns darum, welche Daten zu welchem Zeitpunkt zwischen dem Steuerungsmonitor und dem Lesegerät übermittelt werden müssen. Außerdem machten wir uns Gedanken, wann es sinnvoll ist, Daten auf den Tag zu schreiben oder von ihm zu lesen.
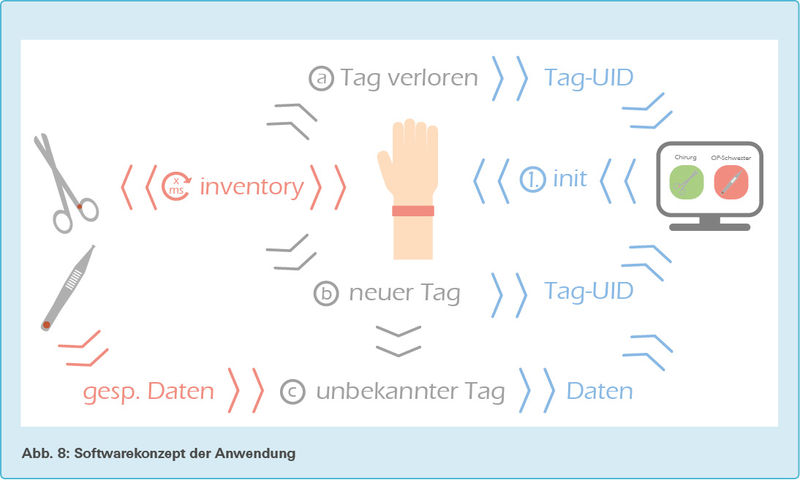
Wie in Abb. 8 zu sehen ist, wird nach dem Aufbau der Bluetooth-Verbindung zwischen dem Lesegerät und dem Steuerungsmonitor eine Initialisierungsnachricht (Abb. 8: 1.init) vom Steuerungsmonitor an das Lesegerät gesendet. Sie enthält sämtliche Informationen über die aktuelle Operation, die später auf jedem benutzten Instrument gespeichert werden.
Die Initialisierungsnachricht legt zudem fest, in welchem Intervall ein sogenannter Inventory-Request (Abfrage aller sich in Lesereichweite befindlichen Tags) vom Lesegerät durchgeführt werden soll. Wird dieser Inventory-Request zum ersten Mal durchgeführt, sind in dieser OP bisher noch keine Instrumente benutzt worden. Folglich handelt es sich bei allen erkannten Tags um für das Lesegerät neue und unbekannte Tags (Fall (b) und (c) in Abb. 8). Deshalb wird sowohl die UID aller erkannten Instrumente als auch sämtliche auf dem Instrument gespeicherte Daten an den Steuerungsmonitor weitergeleitet. Dieser kann die Informationen einerseits direkt anzeigen, andererseits auch in einer Datenbank ablegen. Dann werden vom Lesegerät die auf dem Tag in der Kategorie „letzte Benutzung" gespeicherten Daten aktualisiert, indem sie mit den Daten zur aktuellen OP überschrieben werden, die bei der Initialisierung an das Lesegerät übertragen worden sind.
Auf dem Lesegerät werden zwei Arrays angelegt. Einer speichert sämtliche UIDs der Instrumente, die bei dieser OP bisher zum Einsatz kamen. Im anderen werden nur die UIDs gespeichert, die bei diesem Inventory-Request erkannt worden sind. Somit kann bei späteren Inventory-Requests verglichen werden, welche Veränderungen sich in Bezug auf den vorherigen ergeben haben. Es können dabei drei verschiedene Fälle auftreten (siehe Abb. 8):
- a) „Tag verloren“: Ein Tag, der vorher noch erkannt und benutzt wurde, wird jetzt nicht mehr erkannt bzw. benutzt. Dies wird dem Steuerungsmonitor mitgeteilt, indem ein spezielles Kommando und dessen UID übermittelt werden.
- b) „neuer Tag“: Ein Tag, der vorher nicht erkannt wurde, wird jetzt erkannt. Das heißt, ein neues Instrument befindet sich in Benutzung. Angenommen, es befindet sich im Array mit den bei dieser OP benutzten Instrumenten (Fall (c) tritt nicht ein), genügt es, ein Kommando und die UID des Tags an den Kontrollmonitor zu senden.
- c) „unbekannter Tag“: Wurde das im Fall (b) erkannte Instrument in dieser OP noch nicht benutzt, so müssen zusätzlich zu seiner UID auch alle Daten des Tags an den Steuerungsmonitor übermittelt werden. Außerdem werden dann die Informationen zur „letzten Benutzung" auf dem Tag aktualisiert (vgl. erster Inventory-Request nach der Initialisierung).
Dieser Ablauf gewährleistet, dass zwischen den einzelnen Komponenten unseres Gesamtsystems so wenig wie möglich kommuniziert wird, indem nur bei Veränderungen im Vergleich zum letzten Inventory-Request der Steuerungsmonitor benachrichtigt wird. Dadurch wird der Akku geschont und die Laufzeit des Lesegeräts verlängert.
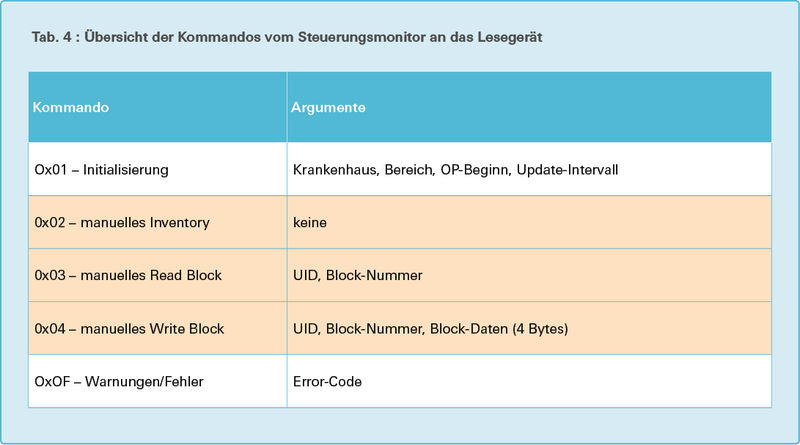
Für die Kommunikation zwischen dem Lesegerät und dem Steuerungsmonitor entwickelten wir ein eigenes Protokoll auf der Grundlage von UART. Wir überlegten uns zuerst, welche Nachrichten bei möglichen Anwendungen zwischen dem Steuerungsmonitor und dem Mikrocontroller im Lesegerät ausgetauscht werden müssen. Derzeit haben wir folgende Kommandos implementiert, von denen einige im Moment noch nicht genutzt werden (siehe rot markierte Zeilen in Tab. 4), aber für Weiterentwicklungen sinnvoll sind.
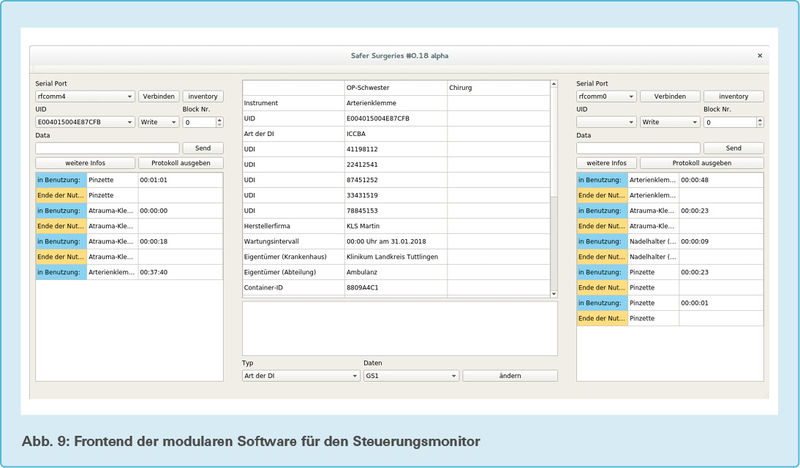
Unser Ziel war es, die Software für den Steuerungsmonitor so modular und universell wie möglich zu gestalten. Bereits die Entscheidung, womit wir diese programmieren, wurde davon beeinflusst. So haben wir uns für eine Entwicklung in QT (eine C++-Klassenbibliothek) entschieden, sodass die Software später plattformübergreifend für eine Vielzahl an Betriebssystemen kompiliert werden kann. Generell haben wir die Software aufgeteilt in ein Backend, welches sich um die Kommunikation mit dem Lesegerät kümmert, und ein Frontend, das je nach konkreter Anwendung unseres Systems individuell gestaltet werden kann. Das Backend basiert auf der QtSerial- Port-Bibliothek, die von uns um Funktionen speziell für unser Lesegerät ergänzt Temperaturwurde. So können auf Grundlage dieser Klasse neue Lesegeräte (bei Bedarf mehrere gleichzeitig) angelegt werden. Dann kann beispielsweise die Initialisierung direkt mit einer von uns dafür angelegten Funktion durchgeführt werden. In Bezug auf das Frontend haben wir momentan eine Oberfläche für die Nutzung im OP entwickelt, welche alle Informationen zum aktuell eingesetzten Instrument anzeigt und an eine MySQL-Datenbank angebunden ist (siehe Abb. 9).
Es gibt Studien, die zu dem Ergebnis kommen, dass RFID-Tags störend für medizinische Geräte sind [29]. Diese Studien sind größtenteils veraltet oder beziehen sich auf Frequenzbereiche, mit denen wir nicht arbeiten.
Generell gibt es sogenannte ISM-Frequenzbänder, die speziell für Anwendungen in der Industrie, der Wissenschaft und erder Medizin reserviert sind. Auf ihnen arbeiten die medizinischen Geräte. Diese ISM-Frequenzbänder beinhalten die Frequenzen 6765 kHz bis 6795 kHz, 61 GHz bis 61,5 GHz, 122 GHz bis 123 GHz und 244 GHz bis 246 GHz [30]. Unsere Tags und unser Lesegerät dagegen arbeiten mit 13,56 MHz, liegen nicht in diesen Frequenzbereichen und sind damit für medizinische Geräte unkritisch, was uns auch vom Klinikum Tuttlingen bestätigt wurde.
Der Tag in den medizinischen Instrumenten ist ein sogenannter In-Metal- Tag, der durch das Versenken im Instrument schon weitestgehend geschützt ist. Wir benötigen allerdings aus physikalischen Gründen einen dünnen eingesägten Schlitz. Diesen planen wir mit einer extra dafür geeigneten Keramik wieder abzudichten, sodass die Oberfläche glatt und ein problemloses Sterilisieren möglich ist.
Wir verwenden zusätzlich den für die Sterilisation zertifizierten NeoTAG Plug MFG4335 [31, 32], der für Temperaturschock und Feuchte qualifiziert ist und zwei Stunden lang Temperaturen von bis zu 220 °C aushält. Dazu haben wir einen Langzeitversuch begonnen, bei dem mit diesen Tags versehene Instrumente mehrmals täglich sterilisiert werden, um diese Angaben zu verifizieren. Bis jetzt haben über 130 dokumentierte Sterilisierungen den Tags nichts anhaben können.
Bisher befindet sich unser Lesegerät unter der OP-Kleidung des OP-Teams und muss somit nicht sterilisiert werden. Das Armband wird manuell angelegt, was einen zusätzlichen Arbeitsschritt bedeutet. Zukünftig ist denkbar ist, dass das Lesegerät direkt in den OP-Kitteln platziert wird.
Als Thema, das besonders intensiver Betrachtung bedarf, hat sich das Antennendesign gezeigt, sodass wir in näherer Zukunft vor allem daran arbeiten werden, die Reichweite des Lesegerätes zu erhöhen. Dazu versuchen wir, die Parameter unserer Antennen sowie deren Anpassschaltungen weiter zu optimieren, um so eine höhere Reichweite zu erhalten. Hierzu planen wir, mit der Abteilung für Elektronikentwicklung der Firma Marquardt unsere Messergebnisse an vektoriellen Netzwerkanalysatoren zu verifizieren. Weiterhin könnten wir auf diese Weise eine ungünstige Anpassschaltung als mögliche Fehlerquelle ausmachen.
Zudem wollen wir ein Augenmerk auf die Energieversorgung des Lesegerätes legen. Dazu haben wir im zweiten Prototypen schon die Möglichkeiten für induktives Laden des Lesegerätakkus über die Antenne vorgesehen.
In Gesprächen mit mehreren Experten aus der Elektronikbranche haben wir Instrumenfestgestellt, dass es mit professionellen Mitteln möglich ist, die Größe der Platine noch deutlich zu verringern. Wir werden dieses Thema vor allem im Hinblick auf eine etwaige Serienproduktion weiter verfolgen.
Wir möchten uns an dieser Stelle ganz herzlich für die finanzielle Unterstützung durch die Baden-Württemberg- Stiftung im Rahmen des mikromakro- Programms bedanken. Des Weiteren geht unser Dank an verschiedene Unternehmen in der Medizintechnik. Aesculap AG: Bereitstellung chirurgischer Instrumente, fachliche Beratung zu den Abläufen im medizinischen Umfeld. KLS Martin Group: Bereitstellung und Präparation chirurgischer Instrumente, Begleitung der Sterilisierungsversuche, Beratung bei der Nachrüstung von chirurgischen Instrumenten mit RFID-Tags. KARL STORZ GmbH & Co. KG: Bereitstellung chirurgischer Instrumente.
Außerdem gilt unser Dank dem Klinikum Tuttlingen, das es uns ermöglicht hat, bei verschiedenen Operationen zu hospitieren und die Abläufe in der Zentralsterilisation kennenzulernen und ausführlich zu diskutieren. Zusätzlich danken wir den Juroren des Regionalwettbewerbs Donau-Hegau und den Jugend-forscht-Juroren beim Landeswettbewerb Baden Württemberg für die ausführlichen und sehr hilfreichen Feedbackrunden zu unserem Projekt. Beide Jurorengruppen haben uns und unser Projekt entscheidende Schritte weiter gebracht, indem sie uns weitere Aspekte nannten, die wir dann beachtet haben.
Besonders bedanken möchten wir uns beim Schülerforschungszentrum Südwürttemberg, Standort Tuttlingen und seinen Betreuern für die Gesamtbetreuung des Projekts über mehrere Jahre und hunderte von Fleischkäsweckle während der gesamten Projektzeit.
[1] Hiroshi Yasuhara, „Prevention of medical accidents baused by defective surgical instruments“ (Februar 2012), www.sciencedirect.com/science/article/pii/S0039606011003126, 07.09.2016
[2] Today Health & Wellness, „TODAY Investigates: Dirty surgical instruments a problem in the OR” (Februar 2012), www.today.com/health/today-investigates-dirty-surgical-instruments-problem-or-1C9382187, 07.09.2016
[3] The Joint Commission, „Sentinel Event Alert: Preventing unintended retained foreign objects”, www.jointcommission.org/assets/1/6/SEA_51_URFOs_10_17_13_FINAL.pdf, 07.09.2016
[4] Arbeitskreis Medizintechnik Berlin-Brandenburg, „Funktransponder (RFID Technologie) in der Medizintechnik“, www.ambb.de/index.php/component/content/article/37-artikel/62-funktransponder-rfid-technologie-in-der-medizintechnik, 03.03.2016
[5] Klinikum Fulda, „Klinikum-Patienten künftig mit RFID-Chips“ (März 2014), www.klinikum-fulda.de/startseite/news-archiv/aktuelles/archiv/13/article/klinikum-patienten-kuenftig-mit-rfid-chips.html, 03.03.2016
[6] Deutsches Ärzteblatt, „RFID-Technologie: Einsatz im Operationssaal“ (Juli 2007), www.aerzteblatt.de/archiv/56288/RFID-Technologie-Einsatz- im-Operationssaal, 03.03.2016
[7] Medizin und Elektronik, „RFID verhindert Kunstfehler“ (Juli 2011), www.medizin-und-elektronik.de/it-inder-klinik/article/80768/0/RFID_verhindert_Kunstfehler/, 03.03.2016
[8] ZIM-Erfolgsbeispiel (BMWi), „Alle Operationsinstrumente am Platz? - RFID-System für chirurgische Instrumente“ (Juni 2009), www.zim-bmwi.de/erfolgsbeispiele/zim-koop-foerderbeispiele/zim-koop-007.pdf, 03.03.2016
[9] ASANUS Medizintechnik GmbH, „ARIS RFID Chip“, www.asanus.de/aris-rfid-chip, 03.03.2016
[10] D. Weisshaupt, M. Weinert, P. Morales, M. Giordano (Aesculap AG), „Einrichtung und Verfahren zum gleichzeitigen Identifizieren einer Vielzahl chirurgischer Instrumente“ (März 2014), www.google.com/patents/DE102012107274A1, 03.03.2016
[11] „RFID-Ready - Informationsportal für RFID-Technologie – Frequenzen“, www.rfid-ready.de/rfid-.requenzen.html, 07.01.2016
[12] Texas Instruments, "`TRF7960A Evaluation Module (EMV)"' User’s Guide (Juni 2012), www.ti.com/lit/ug/slou321a/slou321a.pdf, 08.01.2016
[13] „Smith Chart” in „Antenna Theory”, www.antenna-theory.com/tutorial/smith/chart.php, 08.01.2016
[14] John Schillinger, Texas Instruments, „Antenna Matching for the TRF7960 RFID Reader” Application Report (September 2013), www.ti.com/lit/an/sloa135a/sloa135a.pdf, 08.01.2016
[15] Texas Instruments, „User's Guide: MSP430x2xx Family” (Juli 2013), www.ti.com/lit/ug/slau144j/slau144j.pdf, 12.01.2016
[16] Texas Instruments, „TRF7960A Multiprotocol Fully Integrated 13.56-MHz RFID Reader/Writer IC” Datenblatt (Januar 2015), www.ti.com/lit/ds/slos732e/slos732e.pdf, 12.01.2016
[17] Roving Networks, „RN-41/RN-41-N Class 1 Bluetooth Module”, Datenblatt (09. April 2012), ww1.microchip.com/downloads/en/DeviceDoc/rn-41-ds-v3.42r.pdf, 12.01.2016
[18] Roving Networks, „Bluetooth Data Module Command Reference & Advanced Information User’s Guide” RN41 (26. März 2013), ww1.microchip.com/downloads/en/Device-Doc/bluetooth_cr_UG-v1.0r.pdf, 12.01.2016
[19] Texas Instruments, „MSP430F23x0 - Mixed Signal Microcontroller” Datenblatt (August 2011), www.ti.com/lit/ds/slas518e/slas518e.pdf, 12.01.2016
[20] Texas Instruments, „HF Power Amplifier (Reference Design Guide)” (16. September 2008), e2e.ti.com/cfs-file/__key/communityserver-discussions-components-files/667/1488.appnote_5F00_trf796x_5F00_ pwramp_5F00_4w.pdf, 08.01.2016
[21] Texas Instruments, „bQ5105xB High-Efficiency Qi v1.1-Compilant Wireless Power Receiver and Battery Charger” (März 2015), www.ti.com/lit/ds/symlink/bq51052b.pdf, 08.01.2016
[22] „Qi“ in „Wireless Power Consortium“, www.wirelesspowerconsortium.com, 08.01.2016
